好きなだけ書き殴ろう!!!
進捗ゲージ:設計-50% 製作-5% ソフト-10%
全般的に
とにかく動かせることを目標にする。どうせ勝っても世界大会にはいけない可能性が高いし、
大学の講義の予定によってはそもそもジャパンにすら行けない場合もあるのでそこらへんは諦めておく。
軽量化によって機動力を上げつつ、オムニホイールの工夫によってグリップ力を確保する。カーペットが傷んでも知ったことではない。
動くことを目標にするため、あまり複雑なシステムにしない。自己診断機能やデバッグにも重点を置く。
考えているロボットの構成
ロボットは2~3段構成。
1段目に駆動系、バッテリー、モータードライバ、キッカー、昇圧回路、ラインセンサーなどを搭載する。おそらく一番設計が難しい。
2段目にはボールセンサー、メイン基板を搭載する。ボールセンサーは2段目の下側につく。一段目とのスペースを可能な限り稼ぐため。
明確に3段目について考えているわけではないけど、あれば超音波センサーとLCDを搭載する。なければ二段目。
一段目と二段目のあいだのケーブル接続はフラットケーブルのみにする。おそらく26ピン。
電源に8本(GND4本、5V2本、3.3V2本)、SPIに6本、I2Cに2本、ボール保持センサーに2本、キッカー用に2本。数本は余裕を持たせておく。
モータードライバとラインセンサーは同じマイコンで処理される。低レイテンシ化と簡略化のため。
できれば64ピンぐらいのマイコンを使いたかった。
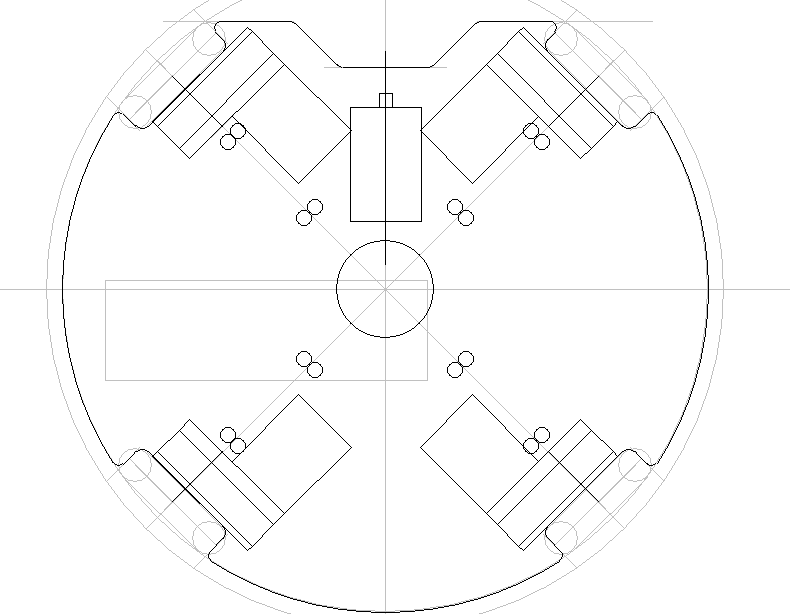
とりあえず今のギアボックスやバッテリー、その他もろもろから考えられる配置。
横に長いのはバッテリー。モータードライバは10*10基板で発注する。
ボール×16、ライン6*3、超音波3~5程度、コンパス(5883L)、ボール保持センサー、マウスセンサー。
→ライン4×2、追加で電流センサー×4、温度センサー×4。バッテリーとゲートドライブ電圧も読む。
できれば電流センサーや温度センサーで保護機能も付けたい。
バッテリーはリポ2セルを想定。
SPEED280で4輪駆動、オムニはダイセンのアルミに近い。たぶん樹脂製。
自作ギアボックスは上下対照でないので右用と左用(設計によっては前と後ろ)がある。
ギア比12:1。かなり高速側に振ってある。
キッカーはおそらく昇圧による。330V100uF程度でソレノイドの抵抗は50Ω程度を考えている。
モータードライバは発注基板で作りたい。ただしパワー系の部分だけ蛇の目にするかも。
Arduino化したAVRマイコンを複数搭載する。
LCD、カラーセンサーは独立しI2Cで接続する。
メインと他マイコンはI2CかSPI、シリアルで接続する。
超音波とモータードライバ/ラインセンサはSPI。ボールはシリアル。
超音波、モータードライバは通信データ長が多く特にモータードライバは応答速度が求められるのでSPI。
LCDとカラーセンサーはもともと遅いのでI2Cを使う。
ボールセンサーはレイテンシの小ささと簡便さからシリアル通信にする。一方的にボールセンサー側から値を送信する。
通信を始める前にメインのマイコンからそれぞれとの通信が正常にできるかチェックする。
DIPは最大20本、32ピンパッケージはA/Dが+2ピン
うちシリアルで2つは必要
アナログ6(2本I2Cと排他)、PWM6(2本SPIと排他)。
メイン
スイッチ×4
SPI通信用×3(クロック・MISO・MOSI)
SPI選択用×3(3ビット・最大8)
I2C×2
シリアル×2
キック×2
ドリブラー×1(PWM)
あまりなし
PWM必須3、アナログ必須2
モータードライバ×2
ライン×4
PWM×2
回転信号×4
SPI×4
シリアル×2
電流×2
バッテリー電圧×1
ゲートドライブ電圧×1
温度×2
あまりなし
PWM必須4、アナログ必須4
ボール
ボール×16
ディティクタ×2
シリアル×2
あまりなし
アナログ必須(?)2
超音波
超音波×8
SPI×4
シリアル×2
6本あまり
PWM必須2
LCD
制御用×6
フルカラーPWM用×3
単色用×1
シリアル×2
I2C×2
6本あまり
PWM必須5、アナログ必須2。
・・・・もしかしてLCDと超音波統合したほうがいいかも。
上下段接続ピンアサイン フラットケーブルで20から26ピン。
GND×4
5V×4
電源電圧×0~1(バッテリ電圧はモータードライバ経由で読む)
DC-DC ON/OFF×1
SPI通信用×3
SPI選択用×3(モータードライバ×2、マウス)
I2C×0 or 2
キッカー×1~2
ドリブラー×1
ディティクタ×1~2
現在最大23、最小18。
最終更新:2014年10月24日 20:04